
South Side Science Fair


Checkers at MSI

Checkers at MSI

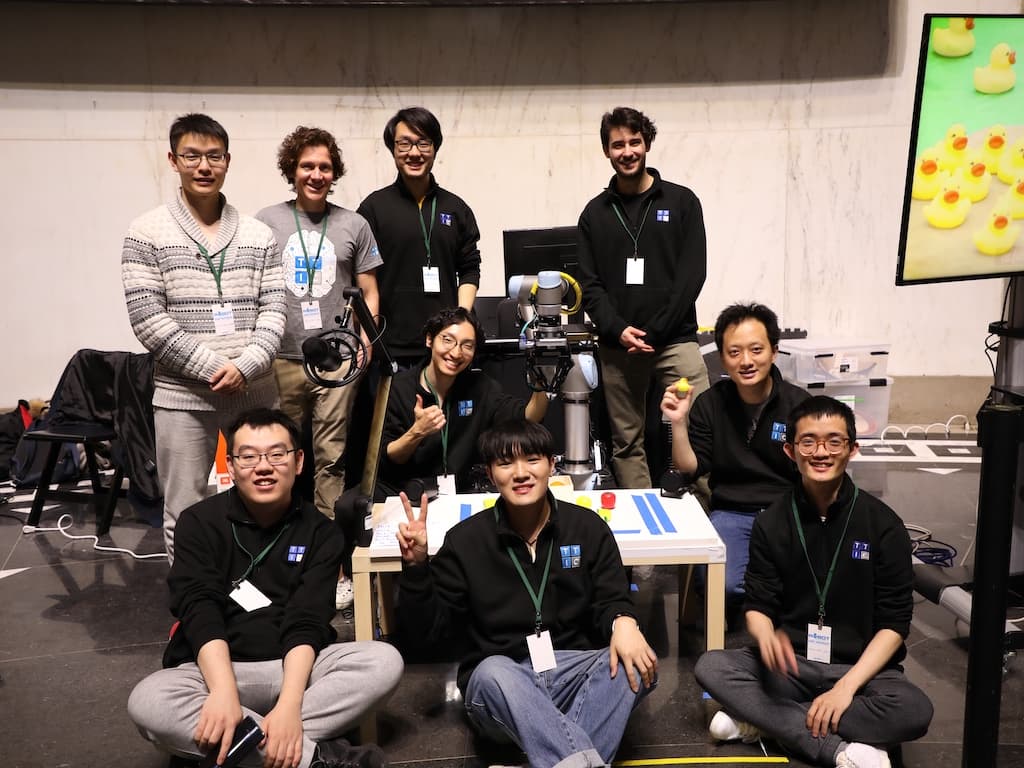
Duckietown at MSI

McDade students visit TTIC

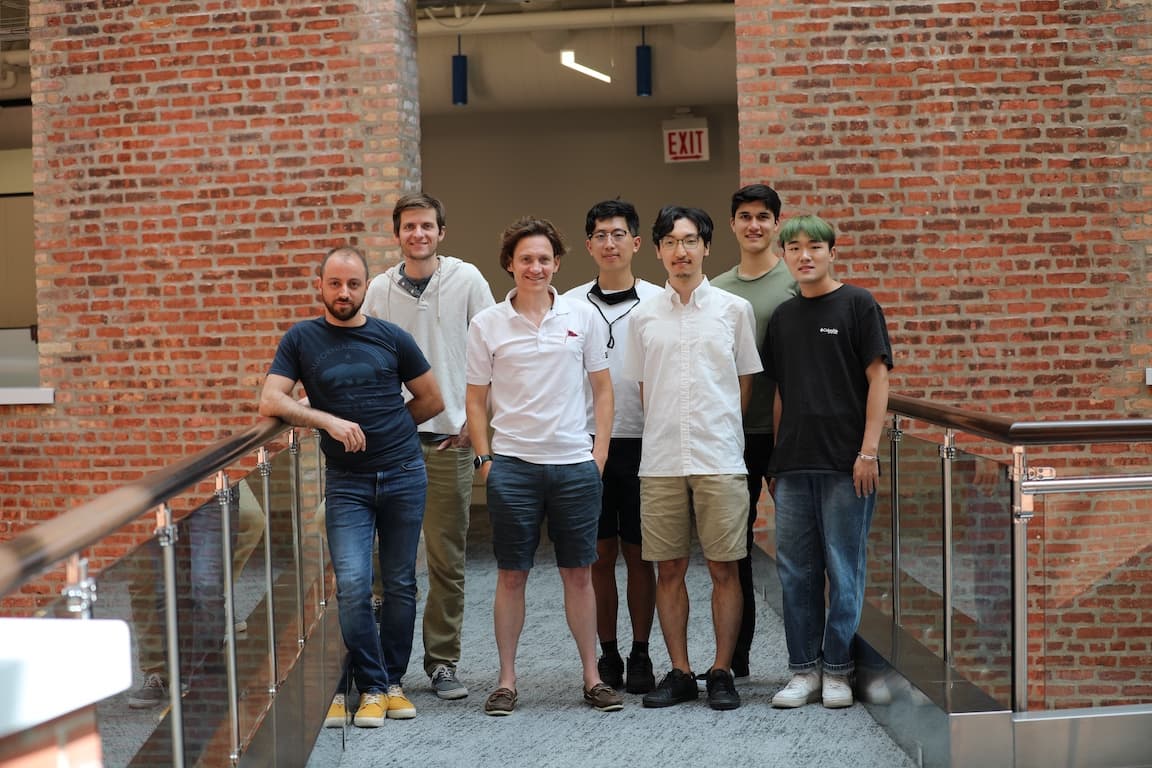
Summer 2022 visiting students

Chip explains how Baxter solves a Rubik's Cube

Baxter solves a Rubik's Cube at MSI

Checkers at MSI

Duckietown Autolab at TTIC


Robot Block Party at MSI


Building Duckiebots (incidentally, the three people here each now work at different self-driving companies)


Checkers at UCLS
The Robot Intelligence through Perception Lab (RIPL) at TTI-Chicago develops intelligent, perceptually aware robots that are able to work effectively with and alongside people in unstructured environments.
RIPL is directed by Professor Matthew R. Walter. Our research focuses on advanced perception algorithms that endow robots with a rich awareness of their surroundings and the ability to interact safely and naturally with humans. We are particularly interested in algorithms that take as input multi-modal observations of a robot’s surround (e.g., laser range data, image streams, and speech) and infer properties of the objects, places, people, and events that comprise a robot’s environment.
We are looking for talented PhD students who are excited about computer vision, natural language understanding, and machine learning for robotics. If you are interested in joining us, consider applying to TTI-Chicago.
We are also looking to host students who are enthusiastic about robotics as part of TTI-Chicago’s Visiting Student Program, and encourage you to apply.
News
| July 2023 |
Together with Greg Shakhnarovich and our collaborators at TRI, we are organizing a Workshop on the Frontiers of Monocular 3D Perception: Geometric Foundation Models at ICCV 2023 in Paris. As the third edition of our workshop series, this event focuses on how we might use geometry to learn and apply ``foundation models’’ in the context of 3D perception. |
|---|---|
| January 2023 |
Andrea Daniele successfully defended his PhD thesis on ``Accessible Interfaces for the Development and Deployment of Robotic Platforms’’!!! He will be leaving us for |
| November 2022 |
Together with Andrea Censi, Jacopo Tani, Liam Paull, and Andrea Daniele, we are kicking off the new edition of our Self-Driving Cars with Duckietown MOOC. |
| August 2022 |
Congrats to Chip Schaff for successfully defending his PhD thesis on ``Neural Approaches to Co-optimization in Robotics’’!!! |
| July 2022 |
Congratulations to Jiading Fang for having his paper on learning consistent multi-view scene representations accepted at ECCV! |
Older news is available here.