
Faculty Research Highlight: Professor Audrey Sedal
Dr. Audrey Sedal is a first-year Research Assistant Professor (RAP) at TTIC, a unique opportunity for a recent PhD graduate. Dr. Sedal earned her PhD in Mechanical Engineering from the University of Michigan - Ann Arbor in 2020, and her research interests are in robotics.
“I think the main thing that is unique about being an RAP is that I’m an independent researcher. Unlike before, when I was a PhD student, I worked toward the grand vision of my lab. As a RAP, I get to work toward my own vision,” said Dr. Sedal. “Tenure track positions are a little different, because you have to meet certain obligations. It’s more responsibility. And then there are postdocs, where you’re not necessarily going to be pursuing your own original ideas.”
The role of an RAP sits somewhere in between, where recent PhD graduates can have a taste of what an academic career will be like, while having the freedom to pursue their own research interests. “I have some research funding, and of course my salary, and this amazing community to interact and collaborate with. I’m getting to pursue my vision in a complete way as an early career researcher.”
Recently, Dr. Sedal completed two projects concerning the challenges of working with non-rigid materials. The first, published in 2020 in the Proceedings of the Royal Society A, centers around combining materials with different “clocks” into the same structure. For example, a spring jumps in a very short period of time, where memory foam takes longer to reconfigure itself. Due to the reaction time of different materials, it can be difficult to gauge how material stretching and softening over time can affect a robot’s motion.
In this study, Dr. Sedal developed a computational model showing new behaviors that a soft robot may exhibit if it is made from materials that have different “clocks.” This model can be used to make soft robots that better interact with the environment, and perform behaviors more safely.
The second study investigates how a mechanical structure known as an orthogonal kirigami pattern (kirigami = paper art which includes cutting) can help us design and build soft robots. During her research, Dr. Sedal discovered how robot designers can use this structure to create adaptable robots that increase their range of motion throughout use. This occurs due to “mechanical intelligence,” a useful behavior that comes naturally from the design rather than having to be deliberately programmed.
Kirigami structures are able to stretch several times their initial length, and can retain that stretched shape while remaining soft, safe, and pliable. A video of the crawling robot that was created as part of this project can be found here.
“Soft robot designers need to strike a balance between structure and compliance: useful soft devices need to be strong enough to perform tasks, but compliant enough to be safe and adaptable,” said Dr. Sedal. This work was completed as part of an internship with Facebook Reality Labs, prior to her joining TTIC in August of 2020.
Currently, Dr. Sedal is working on two larger projects. The first is in collaboration with Professor Matthew Walter and his group, where they are working on questions around how soft robots could be safer and more adaptable than a standard metal robot.
Essentially, soft robots are robots made with “soft” materials. “There’s a spectrum of ways that soft robots can be designed. There can be some that have little pieces of metal or beams that are rigid, but they bend in a specific way. There are completely soft robots on one end, but there are all of these diverse design architectures that span a really wide space of possibilities,” said Dr. Sedal.
“You can imagine in a car factory, for example, there’s this big metal robotic arm that is generally kept in a different section away from where the people work, and there are all of these safety procedures before someone even goes near it. If we want robots that help people in their everyday lives, we need a different type of robot,” said Dr. Sedal. “We need one that will be safer and more adaptable to changes in the environment. Soft robots have that promise.”
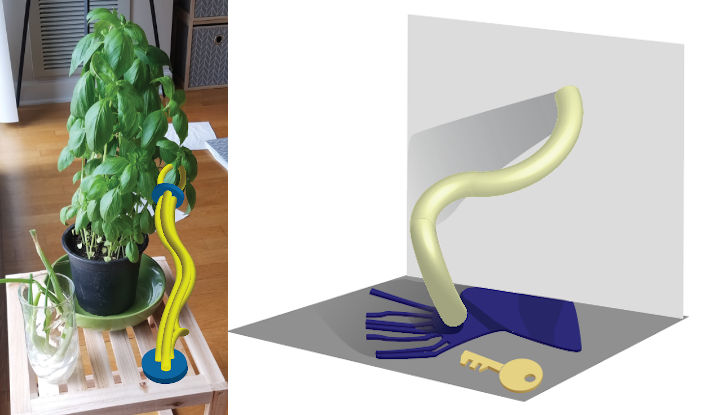
Possible applications of soft robots in the home. In the first image, an imagined soft robot picks leaves from a basil plant. In the next, it searches for lost keys. Images courtesy of Audrey Sedal
Not only could soft robots have a major impact on workplace safety in fields like manufacturing, they could also benefit people in the home. For example, someone with limited mobility. The difficulty is figuring out how to take advantage of the potential of soft robots.
“People can make them do basic tasks, like crawl or pick up blocks and put them somewhere, but how do you unlock all of that potential of the adaptability of soft materials with the programmability of a robot?” said Dr. Sedal. “ You have to look at the control and design together and how they interact. Some important questions are what materials am I using? How big is my robot going to be? What is my strategy for controlling the robot?”
Another project involves soft materials specifically. “Soft robots have this promise that needs to be unlocked, but we need to understand a little more about how different materials behave,” said Dr. Sedal.
Currently, she is exploring the development of models of soft materials, which are much less predictable than normal materials used in the building of robots, like metals. “They can react to different stimuli that a metal doesn’t. For example, if it warms up it might be soft, become even softer than it was, things like that. So I’m working on mathematical models of soft materials that can help us build better soft robots.”
Dr. Sedal originally became interested in soft robotics after graduating with her Bachelor’s Degree in Mechanical Engineering from MIT in 2015. “At that time soft robotics was just emerging. There were a few research groups that had published what have since become the inaugural demonstrations of the potential of soft robots,” said Dr. Sedal.
“I saw some of the videos they put up on YouTube, and I thought it was a really interesting area, because it combined all of these questions about robot autonomy with these questions about fundamentals of materials and mechanical behavior. It had a lot of potential to create robots that are actually helpful.”
She originally chose to study mechanical engineering because of an outreach program that she was involved with as a high school student. The program was MIT’s “Women’s Technology Program in Mechanical Engineering,” a four-week residential summer program for rising high school seniors.
“You know, in high school nobody really knows what they want to do, but I was doing well in my math and physics classes, and I like to be creative too. I like to draw and make art, and things like that. When I went to this program, it was half engineering coursework, and the other half was some cool creative stuff. We took apart a household appliance, and looked at how it worked. We also made a motor, by winding up the coils ourselves. So it seemed like I would get to have that creativity as well as the academic part,” said Dr. Sedal.
As an undergraduate at MIT, she completed a research project in Professor Anette “Peko” Hosoi’s lab where she helped two PhD students who were studying the swimming of fish. “When I was researching things to help with that project, I found this emerging work about soft robots. I thought that was really cool, and I’d like to pursue that further if I could.”
As she continues her research career, there are several questions that she would like to address. “How does this sort of inherent intelligence that a soft robot is supposed to have work in reality? How do we actually unlock that potential through design and control, and maybe other things too that I haven’t thought about yet. Also, where are we going to be able to use AI concepts to help soft robotics?” said Dr. Sedal.
“How do you deal with it when you have such diversity in what a soft robot is? There are all of these different materials you can use that have different properties, and there are different ways that you can arrange them. How do you deal with all of that variety and pick what’s best, and then validate that experimentally to show that it truly is best?”
Currently, Dr. Sedal is co-instructing the “Research at TTIC” class with fellow RAP Saeed Seddighin. “It’s been fun so far, and I’m looking forward to continuing. Everyone has been very forthcoming and kind. I’ve lost out on some of the sense of community (Due to COVID restrictions), but with things like virtual tea times, and just how friendly and approachable people have been, I feel welcomed and integrated into the research community here.”
Our mission is to achieve international impact through world-class research and education in fundamental computer science and information technology.
Internal Links
Contact Us
Chicago, IL 60637
Phone: 773 834 2500
Website: www.ttic.edu
Email: contact@ttic.edu
Instagram: @ttic_connect
LinkedIn: TTIC
Twitter: @TTIC_Connect
BlueSky: @TTICconnect.bsky.social
YouTube: @TTIC_Connect
Copyright © Toyota Technological Institute at Chicago