Publications
For an up-to-date list of our publications, please see Google Scholar.
-
PROGRESSOR: A Perceptually Guided Reward Estimator with Self-Supervised Online RefinementIn Proceedings of the IEEE International Conference on Computer Vision (ICCV) Oct 2025
-
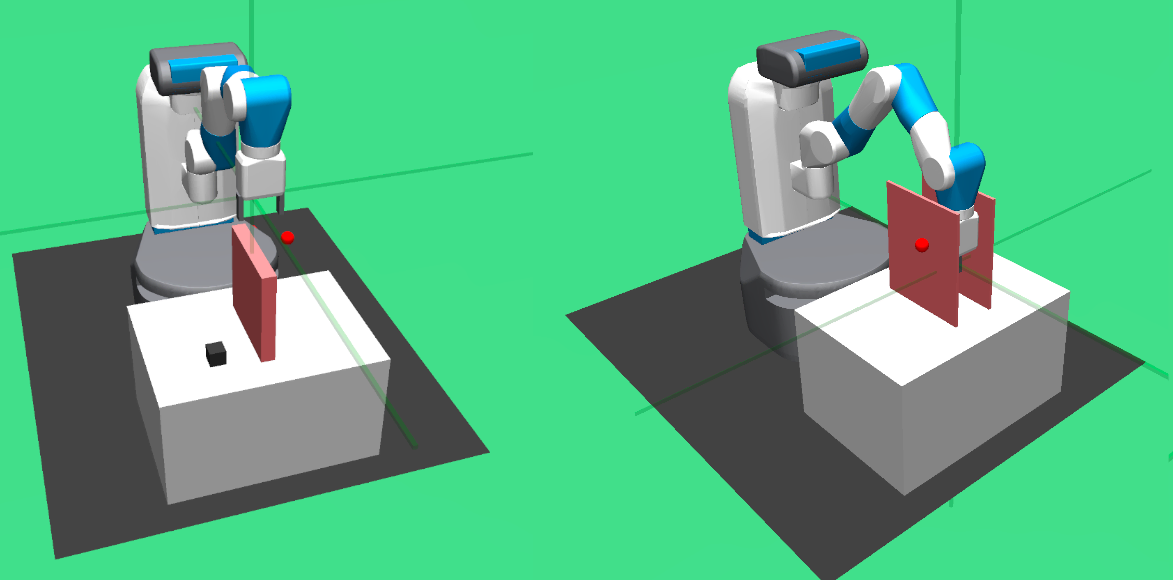
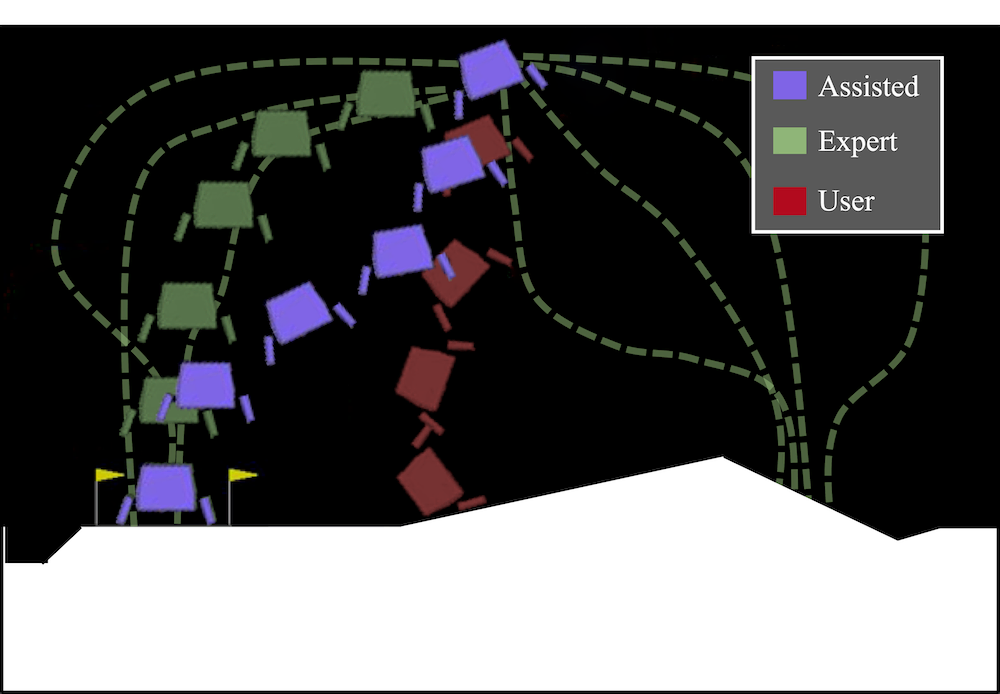
FlashBack: Consistency Model-Accelerated Shared AutonomyIn Proceedings of the Conference on Robot Learning (CoRL) Sep 2025
-
 PAC Learning with ImprovementsIn Proceedings of the International Conference on Machine Learning (ICML) Jul 2025
PAC Learning with ImprovementsIn Proceedings of the International Conference on Machine Learning (ICML) Jul 2025 -
FastMap: Revisiting Dense and Scalable Structure from MotionarXiv preprint arXiv:2505.04612 May 2025
-
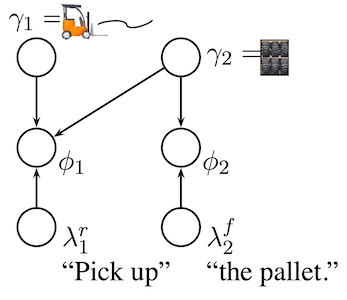
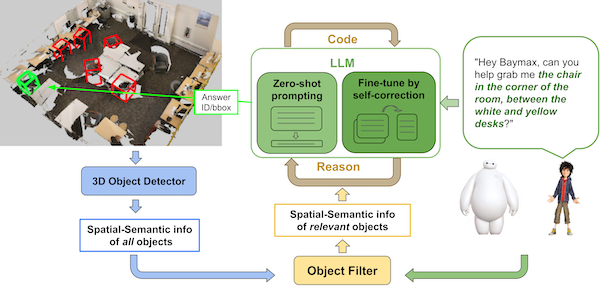 Transcrib3D: 3D Referring Expression Resolution through Large Language ModelsIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Oct 2024
Transcrib3D: 3D Referring Expression Resolution through Large Language ModelsIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Oct 2024 -
 MANGO: A Benchmark for Evaluating Mapping and Navigation Abilities of Large Language ModelsIn Proceedings of the Conference on Language Modeling (COLM) Oct 2024
MANGO: A Benchmark for Evaluating Mapping and Navigation Abilities of Large Language ModelsIn Proceedings of the Conference on Language Modeling (COLM) Oct 2024 -
StackGen: Generating Stable Structures from Silhouettes via DiffusionarXiv preprint arXiv:2409.18098 Sep 2024
-
READ: Retrieval-Enhanced Asymmetric Diffusion for Motion PlanningIn Proceedings of the IEEE/CVF Computer Society Conference on Computer Vision and Pattern Recognition (CVPR) Jul 2024
-
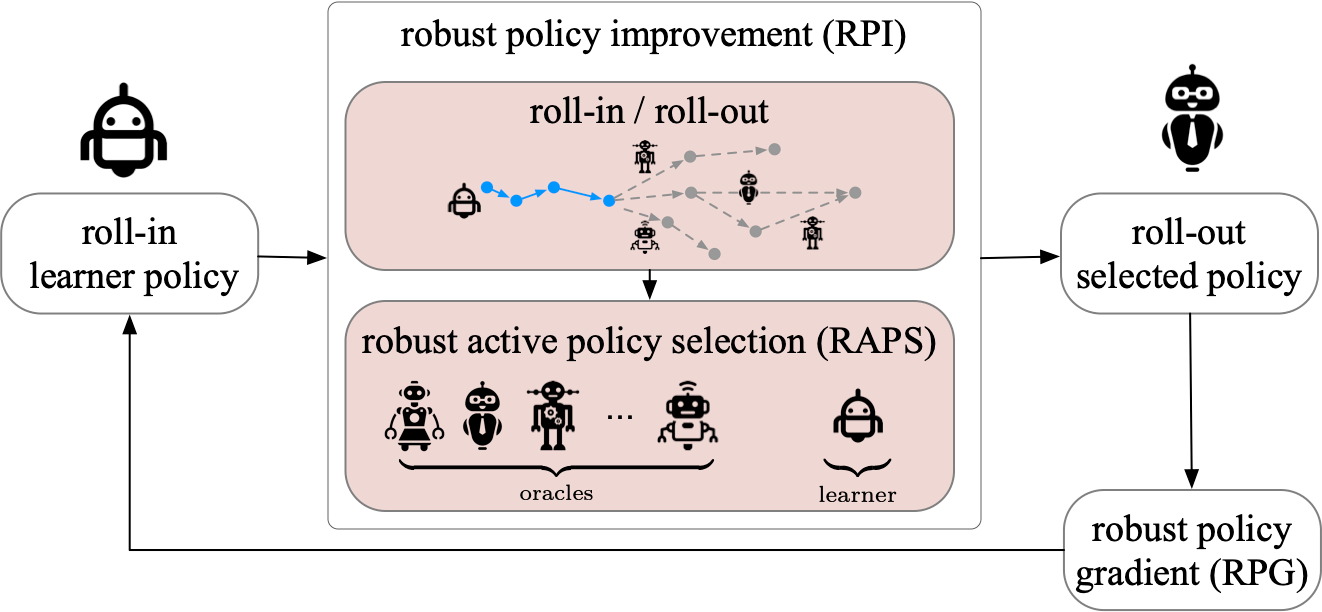 Blending Imitation and Reinforcement Learning for Robust Policy ImprovementIn Proceedings of the International Conference on Learning Representations (ICLR) Apr 2024
Blending Imitation and Reinforcement Learning for Robust Policy ImprovementIn Proceedings of the International Conference on Learning Representations (ICLR) Apr 2024 -
Depth Field Networks for Generalizable Multi-view Scene RepresentationIn Proceedings of the European Conference on Computer Vision (ECCV) Oct 2022
-
Soft Robots Learn to Crawl: Jointly Optimizing Design and Control with Sim-to-Real TransferIn Proceedings of Robotics: Science and Systems (RSS) Jul 2022
-
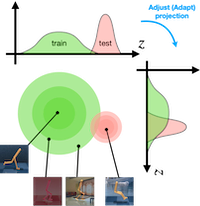 Invariance Through Latent AlignmentIn Proceedings of Robotics: Science and Systems (RSS) Jul 2022
Invariance Through Latent AlignmentIn Proceedings of Robotics: Science and Systems (RSS) Jul 2022 -
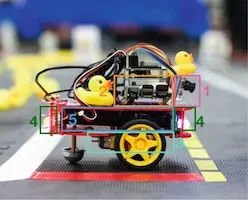
 Integrated Benchmarking and Design for Reproducible and Accessible Evaluation of Robotic AgentsIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Oct 2020
Integrated Benchmarking and Design for Reproducible and Accessible Evaluation of Robotic AgentsIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Oct 2020 -
 Pow-Wow: A Dataset and Study on Collaborative Communication in PommermanIn Proceedings of the International Conference on Machine Learning Workshop on Language in Reinforcement Learning Jul 2020
Pow-Wow: A Dataset and Study on Collaborative Communication in PommermanIn Proceedings of the International Conference on Machine Learning Workshop on Language in Reinforcement Learning Jul 2020 -
Residual Policy Learning for Shared AutonomyIn Proceedings of Robotics: Science and Systems (RSS) Jul 2020
-
 Multigrid Neural MemoryIn Proceedings of the International Conference on Machine Learning (ICML) Jun 2020
Multigrid Neural MemoryIn Proceedings of the International Conference on Machine Learning (ICML) Jun 2020 -
-
-
Finite time analysis of potential-based reward shapingIn Proceedings of the Multi-Disciplinary Conference on Reinforcement Learning and Decision Making (RLDM) Jul 2019
-
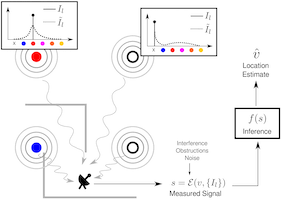 Jointly Optimizing Placement and Inference for Beacon-based LocalizationIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Sep 2017
Jointly Optimizing Placement and Inference for Beacon-based LocalizationIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Sep 2017 -
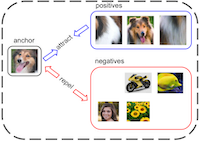
 Satellite Image-based Localization via Learned EmbeddingsIn Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) May 2017
Satellite Image-based Localization via Learned EmbeddingsIn Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) May 2017 -
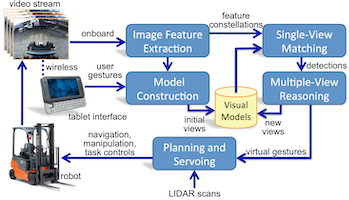
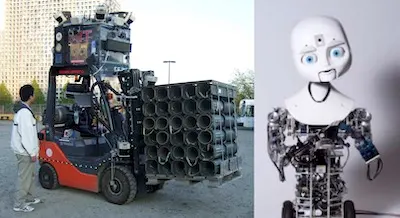
 A Voice-Commandable Robotic Forklift Working Alongside Humans in Minimally-Prepared Outdoor EnvironmentsIn Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) May 2010
A Voice-Commandable Robotic Forklift Working Alongside Humans in Minimally-Prepared Outdoor EnvironmentsIn Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) May 2010 -
 Single-Cluster Spectral Graph Partitioning for Robotics ApplicationsIn Proceedings of Robotics: Science and Systems (RSS) Jul 2005
Single-Cluster Spectral Graph Partitioning for Robotics ApplicationsIn Proceedings of Robotics: Science and Systems (RSS) Jul 2005